
All’ITIA, presso il CNR, c’è chi lavora quotidianamente alla progettazione di ausili per la riabilitazione
Il responsabile scientifico dello sviluppo di dispositivi robotici per la riabilitazione presso CNR-ITIA, Matteo Malosio
Quello della riabilitazione è un tema che interessa non solo chi è affetto da una patologia o da una invalidità cronica, ma potenzialmente tutti, dalle persone che hanno un incidente a chi va incontro ai problemi della terza età. A parte pochi fortunati, insomma, prima o poi dobbiamo tutti confrontarci con la riabilitazione, ovvero con quella serie di accorgimenti che ci permettono di superare o perlomeno gestire un problema fisico e recuperare il più possibile le nostre funzioni motorie.
Pensando alla riabilitazione vengono subito alla mente quelle figure professionali – dal fisioterapista al logopedista, passando per il terapista occupazionale – che hanno un contatto diretto con il paziente, che gli suggeriscono esercizi, manipolano il suo corpo, gli danno indicazioni per la postura o lo allenano grazie a macchinari appositamente studiati per lo scopo. Molto meno note sono le figure professionali che hanno progettato quei macchinari, grazie ai quali è possibile raggiungere risultati sempre più efficaci.
Oggi conosciamo più da vicino una squadra di professionisti del “dietro le quinte della riabilitazione”. All’interno del CNR (Consiglio Nazionale delle Ricerche) c’è infatti un gruppo di lavoro che si occupa di robotica, al cui interno c’è un sottogruppo specializzato in robotica applicata alla riabilitazione. Questa squadra è formata da sette persone ed è capitanata da Matteo Malosio, ingegnere e ricercatore. Stiamo parlando dell’ITIA, ovvero dell’Istituto di Tecnologie Industriali e Automazione del CNR, di Lecco.
Il team è formato da tre ingegneri meccanici, un designer industriale, due bioingegneri e un fisioterapista. Malosio, responsabile scientifico delle attività legate alla robotica applicata alla riabilitazione, ci illustra alcuni dei progetti dell’ITIA, come RIPRENDO@home, svolto in collaborazione con altri istituti del CNR, e dedicato allo sviluppo di soluzioni tecnologiche per soggetti che hanno avuto un ictus e devono recuperare il controllo motorio. All’interno del progetto è stato sviluppato LINarm, un dispositivo a basso costo utilizzando il quale è possibile emulare e riabilitare movimenti funzionali come afferrare un oggetto o avvicinarlo alla bocca, secondo tecniche di mobilizzazione passiva o utilizzando algoritmi di controllo in forza. Il dispositivo consente di monitorare una serie di grandezze utili, come la forza scambiata ed i parametri cinematici relativi al movimento. La versione avanzata del dispositivo, denominata LINarm++ e sviluppata all’interno dell’omonimo progetto nell’ambito dell’iniziativa Europea Echord++, integra, oltre al dispositivo meccatronico, un insieme di sensori per monitorare alcune grandezze fisiologiche del paziente, un sistema di elettrostimolazione facilmente indossabile ed un ambiente di realtà virtuale. L’intera piattaforma è gestita da un sistema di controllo in grado di adattare i parametri di funzionamento del sistema in base alla stato fisiologico del paziente ed al suo livello di abilità motoria. Una serie di test di usabilità svolti da personale sanitario ha riportato risultati positivi sulla reale possibilità di applicazione ed efficacia del dispositivo in ambito riabilitativo.
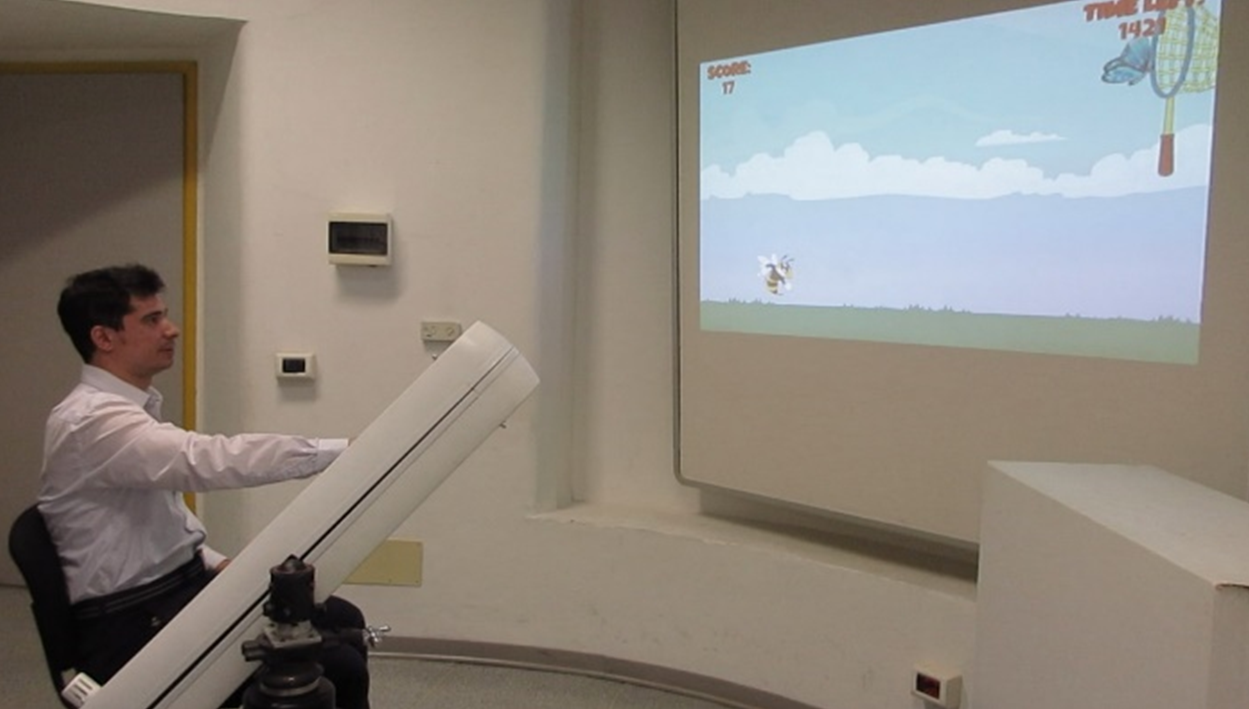
Il prototipo di LINarm++ in funzione
Il primo esperimento della squadra dell’ITIA risale a sei anni fa con l’utilizzo di un robot in ambito riabilitativo, tuttora installato ed utilizzato presso un laboratorio della clinica Villa Beretta in provincia di Lecco. Parallelamente, il gruppo si sta occupando di una soluzione per l’arto inferiore, con lo sviluppo di un dispositivo per la riabilitazione della caviglia a cinematica parallela. Un’azienda ha dimostrato interesse per questa macchina, il che significa che prossimamente potrebbe uscire dall’ambito della sperimentazione e passare all’industrializzazione, così da essere utilizzata su larga scala.
Il presente è strettamente legato alla riabilitazione di soggetti con patologie neuromuscolari. L’ITIA, infatti, è attualmente coinvolto nel progetto Bridge (Behavioural Reaching Interfaces during Daily antiGravity Activities through upper limb Esoskeleton), coordinato dalla Uildm Lecco in collaborazione con il Politecnico di Milano, per la realizzazione di un esoscheletro da montare sulla carrozzina. La Fondazione della Provincia di Lecco Onlus ha selezionato questo progetto e lo ha trasmesso alla Fondazione Cariplo, che ne ha approvato il finanziamento con l’obiettivo di realizzare un braccio robotico che permetta alle persone con una malattia neuromuscolare di svolgere le attività quotidiane sfruttando le capacità residue.
Se presto potremo utilizzare questi ed altri ausili è anche grazie a questi professionisti dietro le quinte, quotidianamente impegnati nella soluzione di problemi nel campo meccanico e riabilitativo.
Articolo di Manuel Tartaglia








